Les Émirats arabes unis étaient sur le point d’entrer dans l’histoire en devenant le premier pays arabe et le quatrième pays au monde à se poser sur la Lune, Rashid Rover était à quelques minutes de l’atterrissage. lorsque l’équipe de contrôle sur Terre a perdu le contact avec le vaisseau spatial dans lequel il voyageait.
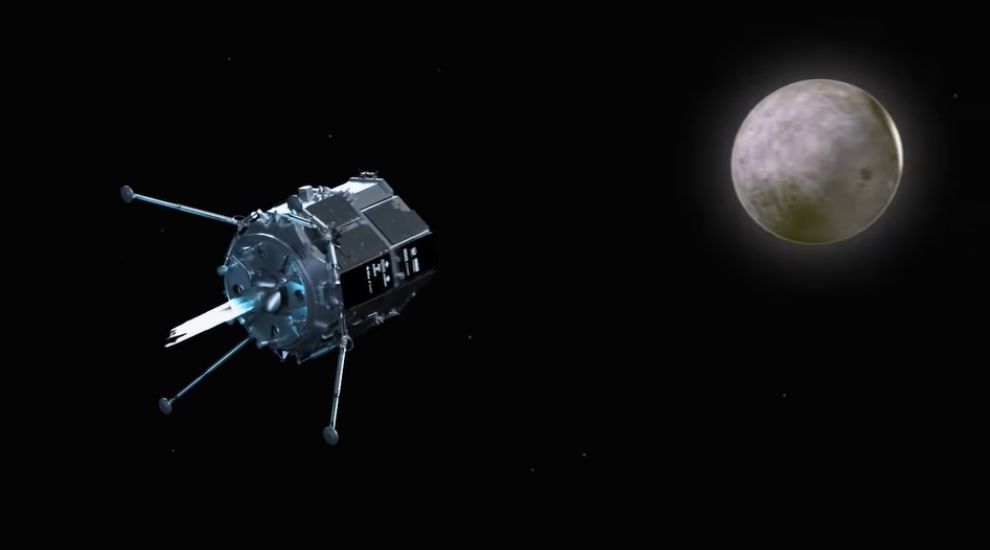
Dans un premier temps, on a supposé que le module Hakuto Mission 1, qui transportait le rover se poserait sur la surface de la Lune à 18 h 41, heure de la péninsule espagnole. démarrage iSpace a confirmé que le centre de contrôle de Nihonbashi (Tokyo). « n’a pas pu confirmer le succès de l’alunissage »..
Les les communications ont cessé lorsque l’atterrisseur a descendu les 10 derniers mètres à une vitesse de 26 kilomètres par heure, bien que, comme le souligne le Khaleej Times, « l’atterrissage d’une sonde à l’aide d’une bombe à retardement a été très difficile ». rover sur la Lune n’est pas une promenade de santé. C’est une tâche très difficile pour plusieurs raisons, notamment la gravité, l’absence d’atmosphère, le régolithe et la communication.
Hier soir, iSpace a expliqué que les ingénieurs et les spécialistes des opérations de mission au Centre de contrôle de la mission essayaient toujours de capter le signal. En outre, le démarrage a ajouté dans un tweet que serait annoncée plus d’informations sur l’état de l’atterrisseur au fur et à mesure qu’elles seraient « disponibles »..
Comme l’a souligné The National News, le plan prévoyait que le Hakuto-R M1 tente d’atterrir dans le cratère de l’Atlas dans la région de Mare Frigoris, sur la face cachée de la Lune, face à la Terre. « iSpace indique que trois sites d’atterrissage alternatifs ont été sélectionnés par mesure de précaution. Si la première tentative est retardée, les dates d’atterrissage alternatives sont le 26 avril, le 1er mai et le 3 mai ».
Cependant, tôt ce matin iSpace a communiqué que le succès de la mission « ne peut être atteint »..
ispace continuera à tirer le meilleur parti des données et du savoir-faire acquis au cours de l’opération jusqu’au succès 8 et de la séquence d’atterrissage, y compris certains aspects du succès 9, afin d’améliorer considérablement la maturité technologique de la mission 2 en 2024 et de la mission 3 en 2025. (2/3)
– ispace (@ispace_inc) 26 avril 2023
Le centre de contrôle de la mission HAKUTO-R a confirmé que l’atterrisseur était « à la verticale » lors de son approche finale de la surface lunaire, selon le communiqué d’iSpace : « Peu après l’heure d’atterrissage prévue, aucune donnée indiquant un atterrissage n’a été reçue. Les ingénieurs d’iSpace ont surveillé l’estimation de la puissance restante des propulseurs au seuil inférieur et peu de temps après, le taux de descente a augmenté rapidement. Ensuite, la perte de communication s’est produite », expliquent-ils.
Sur la base de ces données, il a été déterminé qu' »il y a une forte probabilité que le l’atterrisseur se soit finalement écrasé sur la surface de la Lune.« .
« Nous pensons qu’il est tombé (sur la surface lunaire) après avoir épuisé son carburant », a déclaré Ryo Ujiie, chef des opérations de la mission, lors d’une conférence de presse mercredi.
Pour trouver la cause de cette situation, les ingénieurs d’iSpace travaillent actuellement sur une étude de faisabilité. analyse détaillée des données télémétriques. a acquis jusqu’à la fin de la séquence d’atterrissage et « clarifiera les détails après l’achèvement de l’analyse ».
Ils utiliseront les données recueillies pour « améliorer considérablement la maturité technologique de la mission 2 en 2024 et de la mission 3 en 2025 ».
« Il a été déterminé que le succès 9 des jalons de la mission 1. -(atterrissage réussi sur la Lune et établissement de communications) n’est plus réalisable.. En outre, en tentant de réaliser le succès 9, le centre de contrôle de la mission a pu acquérir des données et des connaissances précieuses du début à la fin de la séquence d’alunissage, ce qui permettra à l’avenir de mener à bien une mission d’alunissage », explique l’entreprise aérospatiale.
Ils sont positifs : « Nous sommes convaincus qu’il s’agit d’une avancée majeure pour l’exploration future de la Lune. et une étape importante pour faire progresser le développement spatial par le secteur privé, non seulement au Japon mais aussi dans le monde entier ».
iSpace déclare qu’elle « continuera à tirer pleinement parti des données et des connaissances acquises au cours de l’exploitation jusqu’au succès 8 et de la séquence d’atterrissage qui comprend des aspects du succès 9, dans le but de d’améliorer considérablement la maturité technologique de la mission 2 en 2024 et de la mission 3 en 2025.« .

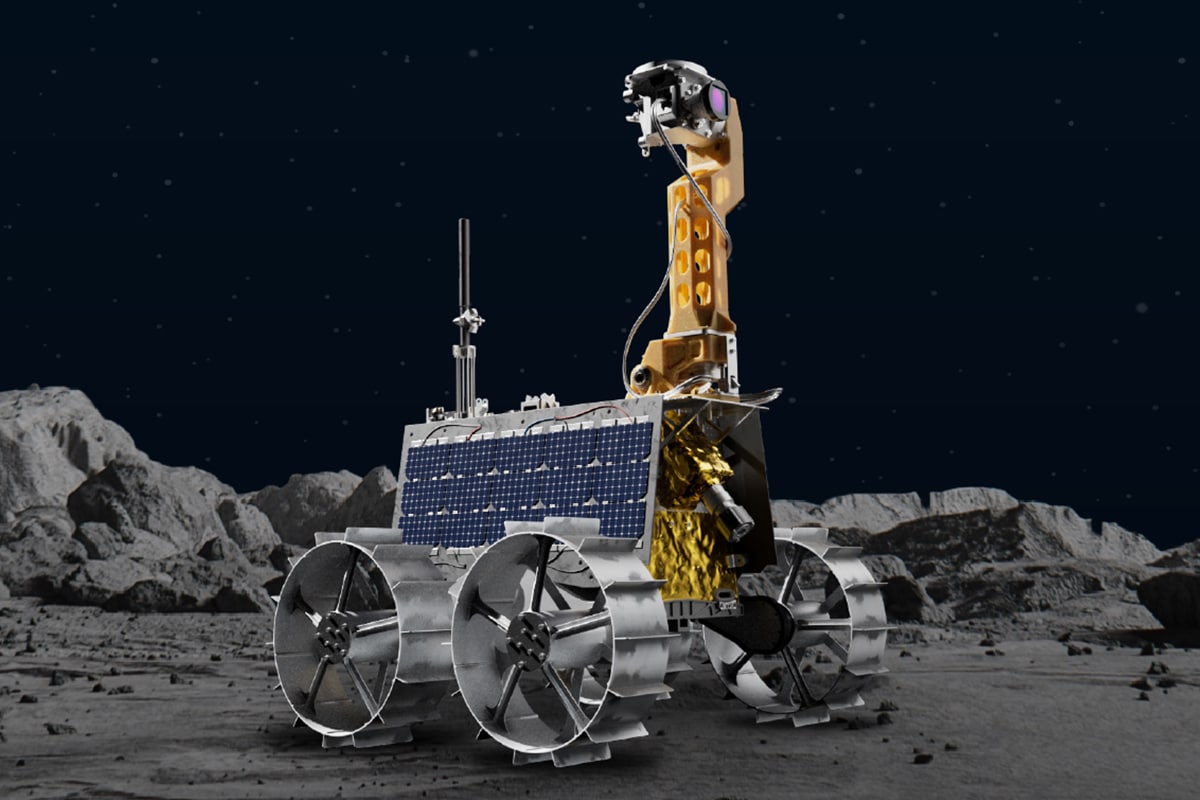
Qu’est-ce que Rashid Rover ?
Rashid est petit véhicule de dix kilos à quatre roues transportant une caméra stéréoscopique au sommet d’un mât, une caméra microscopique d’une résolution de 50 microns, une caméra infrarouge et une sonde de Langmuir pour l’analyse de l’eau. étudier le plasma sur la surface lunaire.
Said rover Le rover émirati peut se déplacer sur la lune à une vitesse de dix centimètres par seconde et peut gravir des pentes allant jusqu’à 20 degrés. Il porte le nom de feu Sheikh Rashid Bin Saeed Al Maktoum.